Uporaba HD zemljevidov za samodejno upravljanje avtonomnih vozil
Avtor: Vilim Šprajc
Mentor: izr. prof. dr. Matej Rojc univ. dipl. inž. el.
Stopnja: 1.
Datum: september, 2020
DKUM: VILIM ŠPRAJC

Avtor: Vilim Šprajc
Mentor: izr. prof. dr. Matej Rojc univ. dipl. inž. el.
Stopnja: 1.
Datum: september, 2020
DKUM: VILIM ŠPRAJC
HD zemljevidi
V projektu podrobneje predstavljamo, kako se lahko avtonomno vozilo zaveda svoje dejanske pozicije in na osnovi teh informacij sistem tudi usmerja vozilo v prostoru, ter katere tehnologije temu služijo, kako uspešne so, in kakšna je glavna problematika. Vsesplošno sprejemanje in nižanje cen naprednih krmilnih sistemov za avtonomno vožnjo (angl. Advanced Driving Automation Systems (ADAS)), nas vedno bolj približuje dobi samovozečih vozil. Kljub temu, pa samo ADAS sistem danes ne zadostuje za realizacijo avtonomnih vozil visoke stopnje. Za reševanje enega od največjih izzivov avtonomne vožnje – določanje natančnega položaja vozila v realnem času – je potreben še en ključni vir in sicer zemljevidi visoke ločljivosti (HD zemljevidi).


Avtonomna vožnja
HD zemljevidi za avtonomna vozila
Avtonomno vozilo potrebuje zemljevid, s katerim lahko določa trenutno lokacijo in načrtuje pot, HD zemljevidi dejansko omogočajo bolj napredno uporabo zaradi natančnih in bolj bogatih informacij. Tako je na primer v pomoč, da ima vozilo informacijo o številu pasov na cestišču, in kako naj se vozilo razvršča, da se pride do željenega cilja bolj optimalno. Običajni zemljevidi so izdelani za naše potrebe, in niso posebej primerni za uporabo v takšnih sistemih. Za razliko od običajnih zemljevidov, vsebujejo namreč HD zemljevidi večjo raznolikost elementov, kot so podatki o omejitvah hitrosti, podrobnosti zgradb in ostalih objektov ob cesti itd. Pomembna je tudi precej večja natančnost, ki jo HD zemljevidi zagotavljajo celo na nivoju centimetrov.
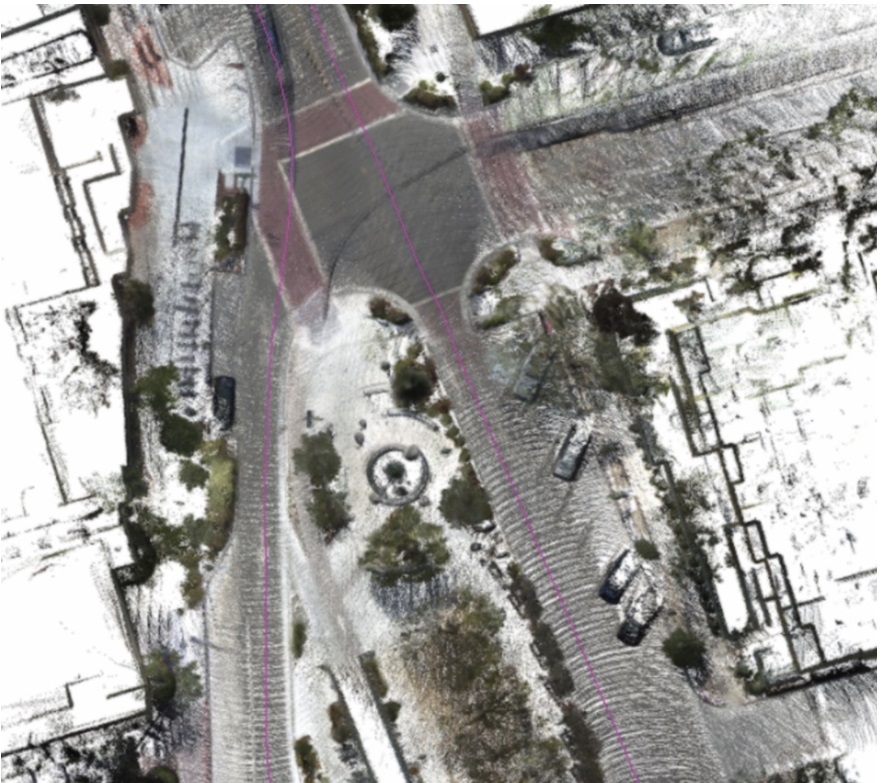

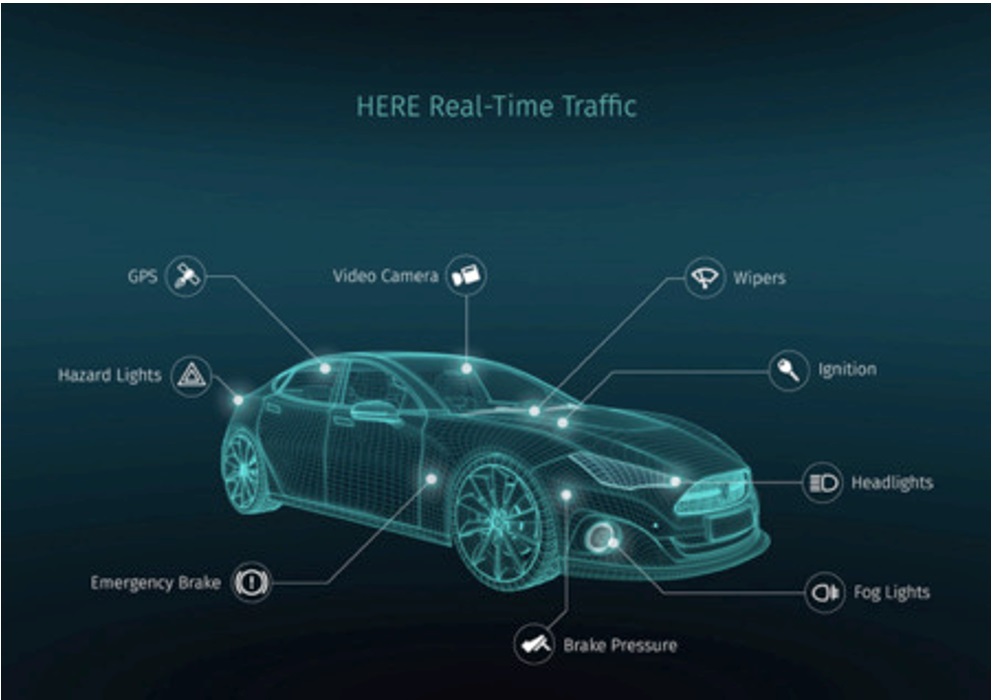
HD zemljevidi tvorjeni iz podatkov s senzorjev
Vsebina HD zemljevidov
Podatki HD zemljevidov so razvrščeni v sloje. Razvrščanje na sloje omogoča samostojno dizajniranje, tvorjenje in uvoz novih podatkov v HD zemljevide. Sloji so med seboj poravnani in indeksirani tako, da se omogoča učinkovito branje informacij za trenutno lokacijo avtonomnega vozila in za predstavitev okolice. Osnovni podatki o mreži cest podanih tudi na prosto dostopnih spletnih zemljevidih se smatrajo kot najnižji sloj takšnih podatkov. Vsak naslednji sloj pa dodaja dodatne informacije. V nadaljevanju bomo podrobneje predstavili programsko opremo Lyft level 5. Štirje najpomembnejši sloji so: osnovni zemljevid, geometrijski zemljevid, pomenski zemljevid, prednostni zemljevid, realno-časovni sloj.
Shranjevanje HD zemljevidov

 Ocenjevanje zaupanja v globokih nevronskih mrežah
Ocenjevanje zaupanja v globokih nevronskih mrežah