Using HD maps to automatically control autonomous vehicles
Author: Vilim Šprajc
Mentor: izr. prof. dr. Matej Rojc univ. dipl. inž. el.
Degree: 1.
Date: september, 2020
DKUM: VILIM ŠPRAJC

Author: Vilim Šprajc
Mentor: izr. prof. dr. Matej Rojc univ. dipl. inž. el.
Degree: 1.
Date: september, 2020
DKUM: VILIM ŠPRAJC
HD maps
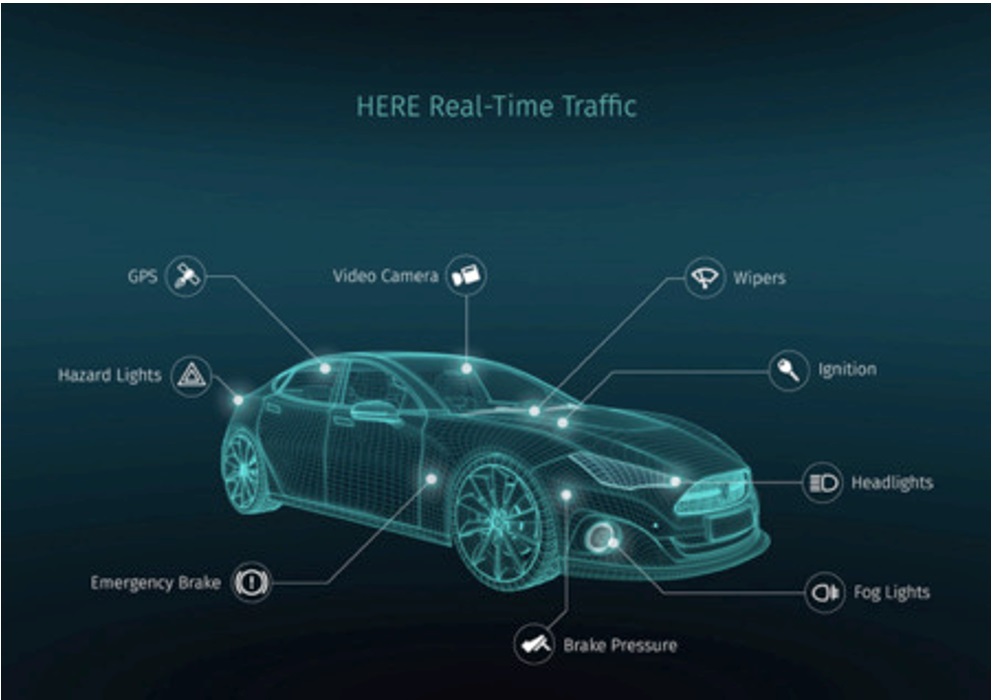
In the project we present in more detail how an autonomous vehicle can be aware of its actual position, how on the basis of this information the system can direct the vehicle in the environment, what technologies perform this, how successful they are, and what the main problems are. The universal acceptance and reduction of prices of Advanced Driving Automation Systems (ADAS) is bringing us closer to the age of self-driving vehicles, stage 5. Nevertheless, the ADAS system alone today is not sufficient for the realization of high-level autonomous vehicles. To solve one of the biggest challenges of autonomous driving – determining the exact position of the vehicle in real time – another key source is needed, namely high-resolution maps (HD maps).


Autonomous driving
HD maps for autonomous vehicles
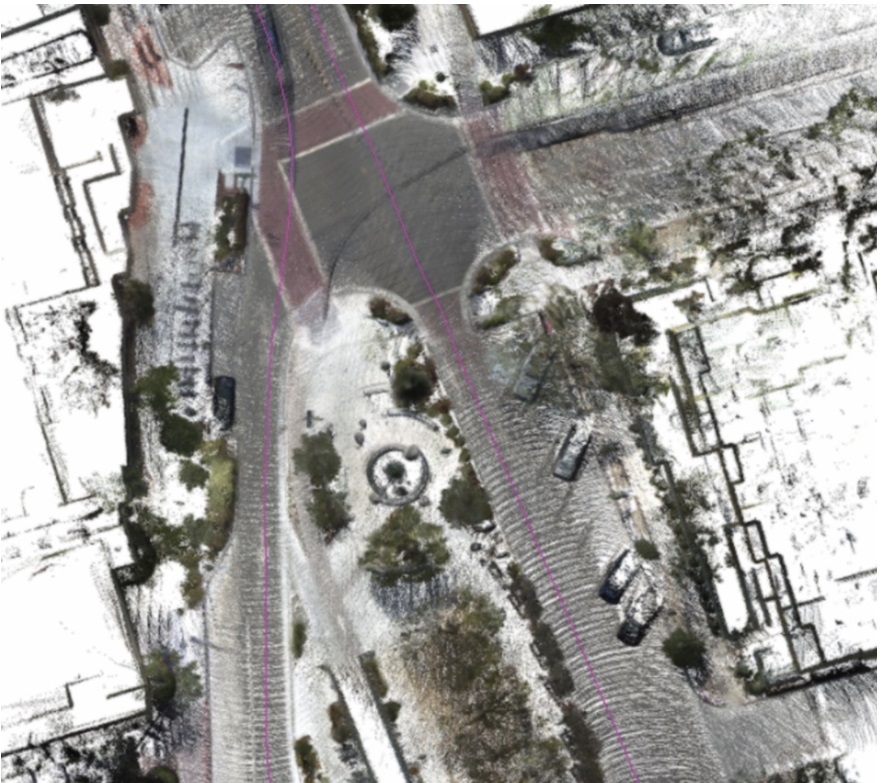

HD maps formed from data from sensors
Contents of the HD maps
HD map data is arranged in layers. Layering allows to independently design, create and import new data into HD maps. The layers are aligned and indexed to allow efficient reading of information for the current location of the autonomous vehicle and for the presentation of the surroundings. Basic data on the road network also given on freely accessible online maps are considered to be the lowest layer of such data. Each subsequent layer, however, adds additional information. The four most important layers are: basic map, geometric map, semantic map, priority map, real-time layer.
Shranjevanje HD zemljevidov

 Confidence estimation in deep neural networks
Confidence estimation in deep neural networks