
 https://dsplab.feri.um.si/wp-content/uploads/magistrska-naloga-aljaz-mlinaric-38.jpg
452
490
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-12-30 18:27:092021-12-30 18:36:14Hybrid solar and piezoelectric power supply system for IoT environments
https://dsplab.feri.um.si/wp-content/uploads/magistrska-naloga-aljaz-mlinaric-38.jpg
452
490
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-12-30 18:27:092021-12-30 18:36:14Hybrid solar and piezoelectric power supply system for IoT environmentsŠtudentski projekti
https://dsplab.feri.um.si/wp-content/uploads/magistrska-naloga-aljaz-mlinaric-38.jpg
452
490
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-12-30 18:27:092021-12-30 18:36:14Hybrid solar and piezoelectric power supply system for IoT environments
https://dsplab.feri.um.si/wp-content/uploads/magistrska-naloga-aljaz-mlinaric-38.jpg
452
490
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-12-30 17:36:472022-07-13 16:42:09Hibridni solarni-piezoelektrični napajalni sistem za IoT okolja https://dsplab.feri.um.si/wp-content/uploads/studij-elektronika-npes-figure1.jpg
1080
1440
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-05-22 19:43:002021-09-28 10:57:19Razvoj pametne palice za slepe in slabovidne osebe z uporabo mikrokrmilnika ARM
https://dsplab.feri.um.si/wp-content/uploads/studij-elektronika-npes-figure1.jpg
1080
1440
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-05-22 19:43:002021-09-28 10:57:19Razvoj pametne palice za slepe in slabovidne osebe z uporabo mikrokrmilnika ARM https://dsplab.feri.um.si/wp-content/uploads/genesis-8.jpg
768
1024
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
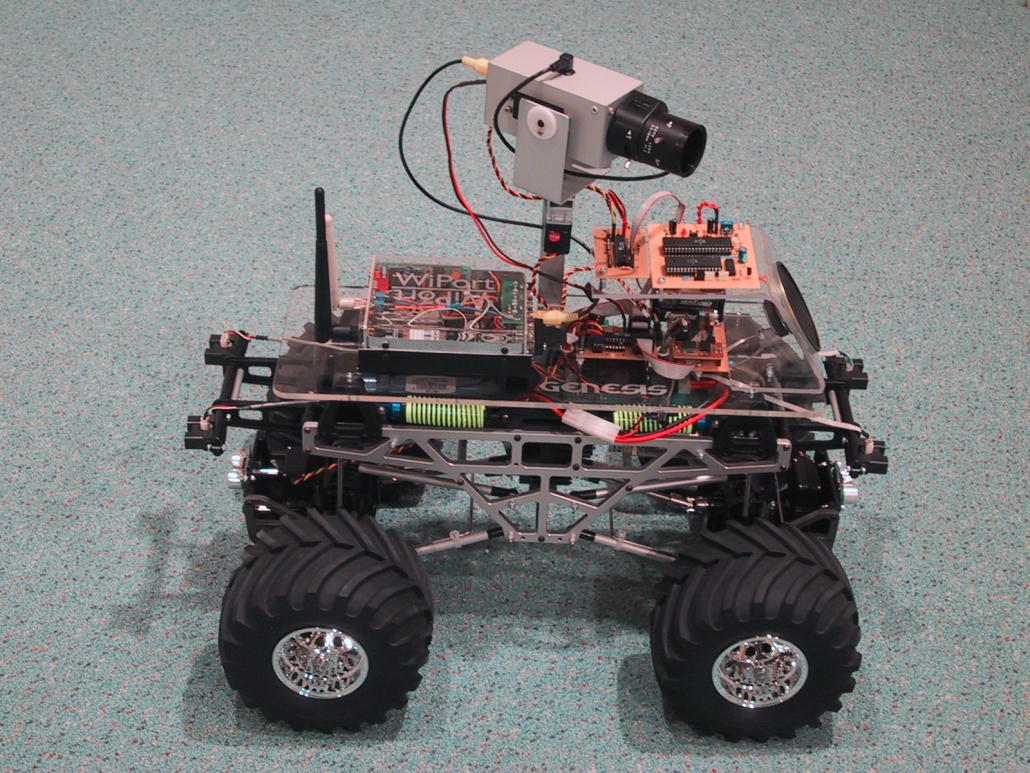
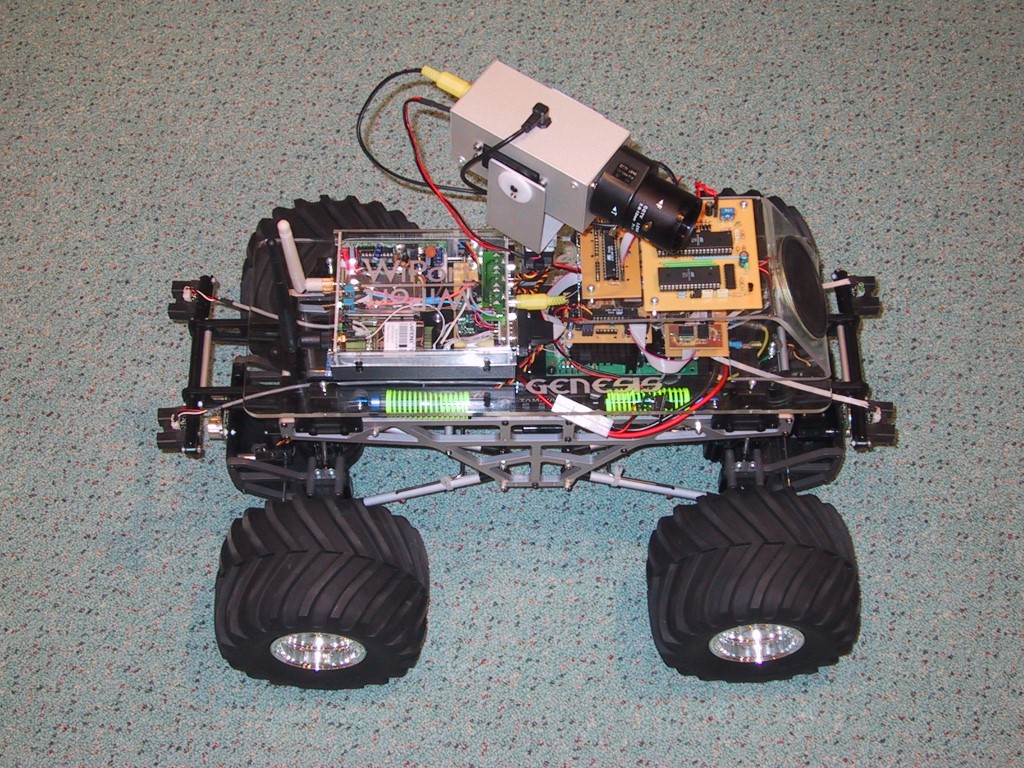
Matej2021-05-22 19:36:002021-10-04 09:22:55Razvoj realno-časovnega krmilnega sistema za avtonomno platformo Genesis na platformi ARM
https://dsplab.feri.um.si/wp-content/uploads/genesis-8.jpg
768
1024
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-05-22 19:36:002021-10-04 09:22:55Razvoj realno-časovnega krmilnega sistema za avtonomno platformo Genesis na platformi ARM https://dsplab.feri.um.si/wp-content/uploads/projekt_vilim_sprajc_2.jpg
503
890
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-02-07 17:51:182021-04-03 13:59:08Razvoj naprednega sistema na platformah GPU za razumevanje okolja avtonomnih vozil
https://dsplab.feri.um.si/wp-content/uploads/projekt_vilim_sprajc_2.jpg
503
890
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-02-07 17:51:182021-04-03 13:59:08Razvoj naprednega sistema na platformah GPU za razumevanje okolja avtonomnih vozil https://dsplab.feri.um.si/wp-content/uploads/peterfekonja-elektronika-magnaloga-0.jpg
630
1183
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-02-07 17:39:412021-03-07 16:57:58Razvoj sistema detekcije objektov za avtonomna vozila z uporabo LiDAR tehnologije
https://dsplab.feri.um.si/wp-content/uploads/peterfekonja-elektronika-magnaloga-0.jpg
630
1183
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2021-02-07 17:39:412021-03-07 16:57:58Razvoj sistema detekcije objektov za avtonomna vozila z uporabo LiDAR tehnologije https://dsplab.feri.um.si/wp-content/uploads/figure-44-Medium.jpg
768
1299
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2020-09-20 19:39:122021-02-14 16:20:10Uporaba HD zemljevidov za samodejno upravljanje avtonomnih vozil
https://dsplab.feri.um.si/wp-content/uploads/figure-44-Medium.jpg
768
1299
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2020-09-20 19:39:122021-02-14 16:20:10Uporaba HD zemljevidov za samodejno upravljanje avtonomnih vozil https://dsplab.feri.um.si/wp-content/uploads/shutterstock_794528257-Medium.jpg
768
1152
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2019-09-29 14:15:172021-02-14 16:21:15Razvoj naprednega sistema za detektiranje voznih pasov na platformah GPU
https://dsplab.feri.um.si/wp-content/uploads/shutterstock_794528257-Medium.jpg
768
1152
Matej
https://dsplab.feri.um.si/wp-content/uploads/dsplab_color.png
Matej2019-09-29 14:15:172021-02-14 16:21:15Razvoj naprednega sistema za detektiranje voznih pasov na platformah GPUGenesis II: Avtonomna platforma z uporabo pogovorne inteligence
Uporaba globokega učenja v avtonomni vožnji za zaznavanje (AI), lokalizacijo, načrtovanje in vožnjo (AI). Uporaba sistema NVIDIA AI za avtonomno vožnjo, kot so: učenje na DGX-1, vožnja z AI na robu, ključni elementi NVIDIA za avtonomno vožnjo, orodja za razvijalce NVIDIA. Ključni izzivi: (i) strojne omejitve – procesiranje, poraba energije, ničelne latence, (ii) natančna ocena modela okolja za izogibanje trčenju, (iii) odvisnost od netočnih zemljevidov in navigacijskih podatkov, (iv) porazdeljene arhitekture HW, zahteve glede prilagodljivosti platforme, (v) visoke absolutne in relativne zahteve po pozicioniranju, (vi) sinhronizacija komponent in izogibanje zakasnitvi, (vii) omejitve glede uporabe vgrajenega pomnilnika, različni pomnilniški modeli, (viii) algoritmi morajo biti konfigurabilni in učinkoviti, (ix) raznoliki vhodi na različnih platformah, (x) simulacija zunaj vozila.
Genesis II: Detekcija voznih pasov z uporabo Jetson TX2 (študent Karlo Crnek)
Genesis I: Predstavljena je govorno krmiljena platforma za inteligentna okolja in/ali podporne aplikacije za IoT okolje.
Platforma ima porazdeljeno arhitekturo, ki omogoča razširjeno povezljivost in podporo za več storitev inteligentnega okolja. Mobilna enota Genesis je sestavni del distribuirane platforme, imenovane DATA sistem, ki omogoča interakcijo med več uporabniki in okoljem. Poleg tega njegova arhitektura odjemalec/strežnik vključuje robustno prepoznavanje govora in mehanizme sinteze besedila v govor za bolj naravno interakcijo med človekom in strojem med uporabniki in mobilno platformo Genesis. Interakcija je usmerjena v večjezičnost. Čeprav je celoten sistem razvit za slovenski jezik, ga je mogoče prilagoditi tudi za druge jezike, če so na voljo ustrezni jezikovni viri. Genesis z visoko natančnostjo neodvisnosti prepoznavanja govora in nizko latenco med ukazom in odzivom dokazuje, da ima dobro manevrsko sposobnost in je enostaven za upravljanje tudi s strani neizkušenega operaterja.
")
Platforma DATA je sestavljena iz enega glavnega strežnika, več modularnih strežnikov in enega ali več odjemalcev (lokalnih ali oddaljenih). En modularni strežnik deluje na Genesisu, drugi pa so potrebni kot podpora za vmesnike, ki temeljijo na HMI na strani odjemalcev, z nameščenimi sistemi ASR in TTS. Programska oprema odjemalcev neposredno komunicira samo z glavnim strežnikom. Glavni strežnik ima tudi vlogo glavnega modula (MU), ki upravlja vse modularne strežnike v skladu z določenimi scenariji uporabnikov. Poleg tega lahko glavni strežnik in modularni strežniki hkrati upravljajo več odjemalcev. Glavni strežnik skrbi za vzpostavljanje povezav med vsemi modularnimi strežniki in odjemalci, ter omogoča izmenjavo podatkov. V predlaganem sistemu upravlja samo eno mobilno robotsko platformo, vendar podpira fleksibilno integracijo dodatnih mobilnih robotskih platform, izbranih za uporabo v specifičnem inteligentnem IoT okolju. Modularni strežnik na platformi Genesis je odgovoren za prenos video, avdio, krmilnih in senzorskih podatkov po vzpostavitvi povezave. Vsi moduli DATA so končni avtomati (FSM) (na osnovi okvira UniMOD). Zato se za želeni scenarij uporabe celotnega sistema lahko uporabljajo vnaprej definirani FSM na osnovi XML.



Modularni strežniki so organizirani na podoben način kot glavni strežnik. Vsebujejo nabor niti (objekt PooledThread). V tem primeru se niti uporabljajo za poganjanje več instanc ASR ali TTS, ki delujejo paralelno. Po vsaki zahtevi glavnega strežnika se razpoložljiva nit preprosto zasede in se uporablja za izvajanje namenske naloge (npr. prepoznavanje govora /sinteza govora, izvajanje krmilnega ukaza itd.). Modularni strežniki TTS ali ASR se odzivajo z ustreznim izhodom (rezultat ASR/sintetizirano sporočilo). Kadar ni več na voljo nobene niti, modularni strežniki shranijo prejete podatke, odzivnost celotnega sistema pa se lahko upočasni. Protokol, ki se uporablja med glavnim strežnikom in vsemi modularnimi strežniki, je tudi lasten protokol, ki temelji na XML, kar pomeni, da se navadni tekstovni paketi XML uporabljajo na način zahteva/potrditev, in vsebujejo na primer značilke za ASR, besedilo za TTS, ali podatke mobilne robotske enote. Razred BaseServer se uporablja za komunikacijo z glavnim strežnikom. Za izvajanje mehanizma za prenos podatkov se uporablja razširjeni razred ServerService. Vmesnik FrameTransporter definira načine za pošiljanje/prejemanje paketov do/od glavnega strežnika. Razred XML-Frame se uporablja za gradnjo/transport paketov XML do/od modularnega strežnika. Ta razred je izpeljava splošnejšega razreda Frame. Razred ServerService skrbi za vzpostavitev povezave z glavnim strežnikom in nadzira ustvarjanje baze z nitmi. Modularni strežnik TTS oddaja audio preko RTP protokola. Po drugi strani modularni strežnik ASR preprosto prejema značilke z glavnega strežnika in vrača rezultate ASR. Vsi modularni strežniki zato potrebujejo RTP modul, ki vsebuje ustrezne objekte in metode, potrebne za sprejemanje RTP paketov. Ker sta ASR in TTS napisana v programskem jeziku C/C ++, je na modularnih strežnikih uporabljen JNI (Java native vmesnik).




Aktivnosti projekta

Projektna skupina
Znanstvene in inženirske ekspertize